Pytorch(13)正则化
[PyTorch 学习笔记] weight decay、 dropout和Normalization
这篇文章主要介绍了正则化与偏差-方差分解,以及 PyTorch 中的 L2 正则项--weight decay
一、Regularization -weight decay
Regularization 中文是正则化,可以理解为一种减少方差的策略。
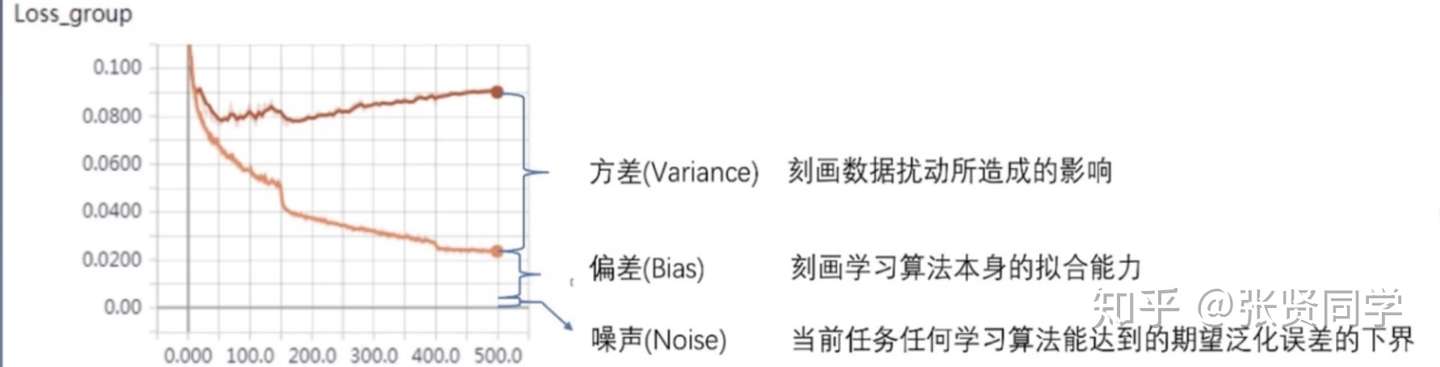
在机器学习中,误差可以分解为:偏差,方差与噪声之和。即误差=偏差+方差+噪声
- 偏差:度量了学习算法的期望预测与真实结果的偏离程度,即刻画了学习算法本身的拟合能力。
- 方差:度量了同样大小的训练集的变动所导致的学习性能的变化,即刻画了数据扰动所造成的影响。
- 噪声:表达了在当前任务上学习任何算法所能达到的期望泛化误差的下界。
正则化方式有 L1 和 L2 正则项两种。其中 L2 正则项又被称为权值衰减(weight decay)。
当没有正则项时:,
当使用 L2 正则项时,,
,其中
,所以具有权值衰减的作用。
二、Dropout
深度学习中Dropout原理解析 - Microstrong的文章 - 知乎 https://zhuanlan.zhihu.com/p/38200980
Dropout 是另一种抑制过拟合的方法。在使用 dropout 时,数据尺度会发生变化,如果设置 dropout_prob =0.3,那么在训练时,数据尺度会变为原来的 70%;==而在测试时,执行了 model.eval() 后,dropout 是关闭的,因此所有权重需要乘以 (1-dropout_prob),把数据尺度也缩放到 70%==。加了 dropout 之后,权值更加集中在 0 附近,使得神经元之间的依赖性不至于过大。
PyTorch 中 Dropout 层如下,通常放在每个网路层的最前面:
1 | torch.nn.Dropout(p=0.5, inplace=False) |
参数:
- p:主力需要注意的是,p 是被舍弃的概率,也叫失活概率;代码层面实现让某个神经元以概率p停止工作,其实就是让它的激活函数值以概率p变为0
2.1 Dropout具体工作流程
- 首先随机(临时)删掉网络中一部分的隐藏神经元,输入输出神经元保持不变(图3中虚线为部分临时被删除的神经元)
- 然后把输入x通过修改后的网络前向传播,然后把得到的损失结果通过修改的网络反向传播。一小批训练样本执行完这个过程后,在没有被删除的神经元上按照随机梯度下降法更新对应的参数(w,b)。
- 恢复被删掉的神经元(此时被删除的神经元保持原样,而没有被删除的神经元已经有所更新)
- 重复上述过程
2.2 ==为什么dropout 可以解决过拟合?== 【共享隐藏单元的bagging集成模型】
- 取平均的作用: 整个dropout过程就相当于对很多个不同的神经网络取平均。而不同的网络产生不同的过拟合,一些互为“反向”的拟合相互抵消就可以达到整体上减少过拟合。
- 减少神经元之间复杂的共适应关系: 因为dropout程序导致两个神经元不一定每次都在一个dropout网络中出现。这样权值的更新不再依赖于有固定关系的隐含节点的共同作用,阻止了某些特征仅仅在其它特定特征下才有效果的情况 。从这个角度看dropout就有点像L1,L2正则,减少权重使得网络对丢失特定神经元连接的鲁棒性提高。
- Dropout纯粹作为一种高效近似Bagging的方法。然而,有 比这更进一步的Dropout观点。==Dropout不仅仅是训练一个Bagging的集成模型,并且是共享隐藏单元的集成模型==。这意味着无论其他隐藏单元是否在模型中,每个隐藏单元必须都能够表现良好。
model.eval() 和 model.trian()
有些网络层在训练状态和测试状态是不一样的,如 dropout 层,在训练时
dropout
层是有效的,但是数据尺度会缩放,为了保持数据尺度不变,所有的权重需要除以
1-p。而在测试时 dropout
层是关闭的。因此在测试时需要先调用model.eval()设置各个网络层的的training属性为
False,在训练时需要先调用model.train()设置各个网络层的的training属性为
True。
三、Normalization
深度学习基础 之 ---- BN、LN、IN、GN、SN - 琪小钧的文章 - 知乎 https://zhuanlan.zhihu.com/p/524829507
这篇文章主要介绍了 Batch Normalization 的概念,以及 PyTorch 中的 1d/2d/3d Batch Normalization 实现。
3.1 Batch Normalization
BN层的作用是把一个batch内的所有数据,从不规范的分布拉到正态分布。这样做的好处是使得数据能够分布在激活函数的敏感区域,敏感区域即为梯度较大的区域,因此在反向传播的时候能够较快反馈误差传播。
称为批标准化。批是指一批数据,通常为 mini-batch;经过处理后的数据符合均值为0,标准差为1的分布,如果原始的分布是正态分布,那么z-score标准化就将原始的正态分布转换为标准正态分布,机器学习中的很多问题都是基于正态分布的假设,这是更加常用的归一化方法。Batch Normalization 层一般在激活函数前一层。
批标准化的优点有如下:
- 可以使用更大的学习率,==加速模型收敛==
- 可以不用精心设计权值初始化
- 可以不用 dropout 或者较小的 dropout
- 可以不用 L2 或者较小的 weight decay
- 可以不用 LRN (local response normalization)
假设输入的 mini-batch 数据是
,Batch Normalization 的可学习参数是
,步骤如下:
- 求 mini-batch 的均值:
- 求 mini-batch 的方差:
- 标准化:
,其中
是放置分母为 0 的一个数
- affine transform(缩放和平移):
,这个操作可以增强模型的 capacity,也就是让模型自己判断是否要对数据进行标准化,进行多大程度的标准化。如果
,
,那么就实现了恒等映射。
Batch Normalization 的提出主要是为了解决 Internal Covariate Shift (ICS)。在训练过程中,数据需要经过多层的网络,如果数据在前向传播的过程中,尺度发生了变化,可能会导致梯度爆炸或者梯度消失,从而导致模型难以收敛。
带有 bn 层的 LeNet 定义如下:
1 | class LeNet_bn(nn.Module): |
带 bn 层的网络,并且不使用 kaiming 初始化权值,训练过程如下:
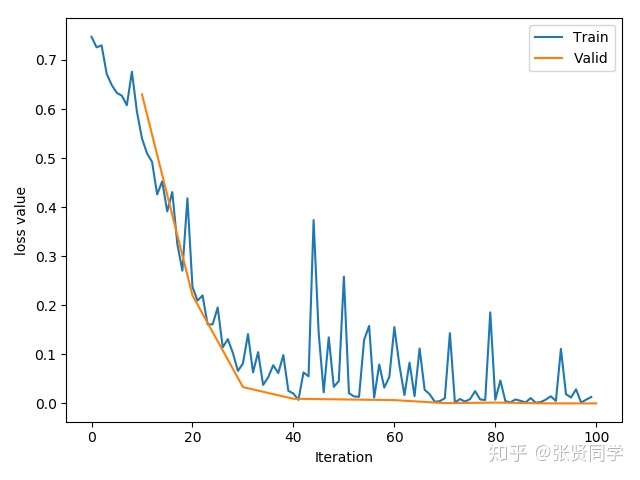
虽然训练过程中,训练集的 loss 也有激增,但只是增加到 0.4,非常稳定。
3.2 Batch Normalization in PyTorch
在 PyTorch 中,有 3 个 Batch Normalization 类
- nn.BatchNorm1d(),输入数据的形状是
- nn.BatchNorm2d(),输入数据的形状是
- nn.BatchNorm3d(),输入数据的形状是
以nn.BatchNorm1d()为例,如下:
1 | torch.nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) |
参数:
- num_features:一个样本的特征数量,这个参数最重要
- eps:在进行标准化操作时的分布修正项
- momentum:指数加权平均估计当前的均值和方差,在训练时,均值和方差采用指数加权平均计算,也就是不仅考虑当前 mini-batch 的值均值和方差还考虑前面的 mini-batch 的均值和方差。
- affine:是否需要 affine transform,默认为 True
- track_running_stats:True 为训练状态,此时均值和方差会根据每个 mini-batch 改变。False 为测试状态,此时均值和方差会固定
主要属性:
- runninng_mean:均值
- running_var:方差
- weight:affine transform 中的
- bias:affine transform 中的
3.3 Layer Normalization
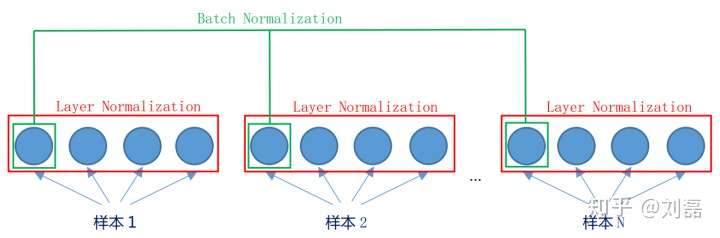
batch是“竖”着来的,各个维度做归一化,所以与batch size有关系。 layer是“横”着来的,对一个样本,不同的神经元neuron间做归一化。
提出的原因:Batch Normalization 不适用于变长的网络,如 RNN。如下显示了同一层的神经元的情况。假设这个mini-batch一共有N个样本,则Batch Normalization是对每一个维度进行归一。而Layer Normalization对于单个的样本就可以处理。bn和ln都可以比较好的抑制梯度消失和梯度爆炸的情况。思路:每个网络层计算均值和方差。
注意事项:
- 不再有 running_mean 和 running_var
和
为逐样本的
1 | torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True) |
3.4 Instance Normalization
提出的原因:Batch Normalization 不适用于图像生成。因为在一个 mini-batch 中的图像有不同的风格,不能把这个 batch 里的数据都看作是同一类取标准化。
思路:逐个 instance 的 channel 计算均值和方差。也就是每个 feature map 计算一个均值和方差。
包括 InstanceNorm1d、InstanceNorm2d、InstanceNorm3d。
以InstanceNorm1d为例,定义如下:
1 | torch.nn.InstanceNorm1d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False) |
参数:
- num_features:一个样本的特征数,这个参数最重要
- eps:分母修正项
- momentum:指数加权平均估计当前的的均值和方差
- affine:是否需要 affine transform
- track_running_stats:True 为训练状态,此时均值和方差会根据每个 mini-batch 改变。False 为测试状态,此时均值和方差会固定
3.5 Group Normalization
提出的原因:在小 batch 的样本中,Batch Normalization 估计的值不准。一般用在很大的模型中,这时 batch size 就很小。
思路:数据不够,通道来凑。 每个样本的特征分为几组,每组特征分别计算均值和方差。可以看作是 Layer Normalization 的基础上添加了特征分组。
4、相关问题
为啥用LN而不用BN在Transformer里?
BN是对一批数据进行归一化,一批里有不同的样本,bn对不同样本的同一个通道的特征(channel)进行均值方差操作;而LN对同一个样本内部的不同特征进行均值方差操作。
BN在batch size(N)和WH上进行缩放,保留C,而LN是在C和HW上进行缩放,保留bitch size,在NLP中就对应句子长度,通常来说文本词句的长度是不一样的,如果使用BN则会导致靠前的bitch size里的数据可以做相同的均值方差操作,而靠后的多余的数据的方差和均值难以估计,如下图
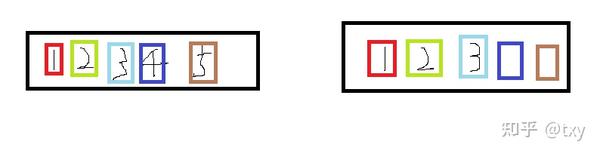
第一个样本里有5个数据通道(可看作特征),第二个样本空间里有3个数据通道(特征),则在提取特征时前三个的均值方差满足同一个norm操作公式,而后面两个由于第二个样本没有数据,所以均值方差不满足其公式,导致误差产生。