深度学习(6)LSTM*
LSTM和GRU算法简单梳理🍭
前言 - 从反向传播推导到梯度消失and爆炸的原因及解决方案?
- 从反向传播推导到梯度消失and爆炸的原因及解决方案(从DNN到RNN,内附详细反向传播公式推导) - 韦伟的文章 - 知乎 https://zhuanlan.zhihu.com/p/76772734
本质上是因为神经网络的更新方法,梯度消失是因为反向传播过程中对梯度的求解会产生sigmoid导数和参数的连乘,sigmoid导数的最大值为0.25,权重一般初始都在0,1之间,乘积小于1,多层的话就会有多个小于1的值连乘,导致靠近输入层的梯度几乎为0,得不到更新。梯度爆炸是也是同样的原因,只是如果初始权重大于1,或者更大一些,多个大于1的值连乘,将会很大或溢出,导致梯度更新过大,模型无法收敛。其实梯度爆炸和梯度消失问题都是因为网络太深,网络权值更新不稳定造成的,本质上是因为梯度反向传播中的连乘效应。
一、反向传播推导到梯度消失and爆炸的原因及解决方案
1.1 ==反向传播推导:==
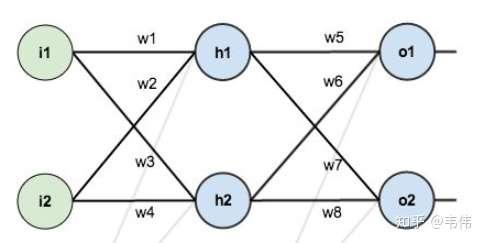
以上图为例开始推起来,先说明几点,i1,i2是输入节点,h1,h2为隐藏层节点,o1,o2为输出层节点,除了输入层,其他两层的节点结构为下图所示:
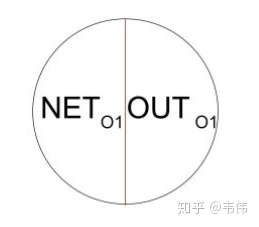
举例说明, 为输出层的输入,也就是隐藏层的输出经过线性变换后的值,
为经过激活函数sigmoid后的值;同理
为隐藏层的输入,也就是输入层经过线性变换后的值,
为经过激活函数sigmoid 的值。只有这两层有激活函数,输入层没有。
定义一下sigmoid的函数:
说一下sigmoid的求导:
定义一下损失函数,这里的损失函数是均方误差函数,即:
具体到上图,就是:
到这里,所有前提就交代清楚了,前向传播就不推了,默认大家都会,下面推反向传播。
- 第一个反向传播(热身)
先来一个简单的热热身,求一下损失函数对W5的偏导,即:
首先根据链式求导法则写出对W5求偏导的总公式,再把图拿下来对照(如上),可以看出,需要计算三部分的求导【损失函数、激活函数、线性函数】,下面就一步一步来:
综上三个步骤,得到总公式:
- 第二个反向传播:
接下来,要求损失函数对w1的偏导,即:
还是把图摆在这,方便看,先写出总公式,对w1求导有个地方要注意,w1的影响不仅来自o1还来自o2,从图上可以一目了然,所以总公式为:
所以总共分为左右两个式子,分别又对应5个步骤,详细写一下左边,右边同理:
右边也是同理,就不详细写了,写一下总的公式:
这个公式只是对如此简单的一个网络结构的一个节点的偏导,就这么复杂。。亲自推完才深深的意识到。。。
为了后面描述方便,把上面的公式化简一下, 记为
,
记为
,则:
1.2 ==梯度消失,爆炸产生原因:==
从上式其实已经能看出来,求和操作其实不影响,主要是是看乘法操作就可以说明问题,可以看出,损失函数对w1的偏导,与
,权重w,sigmoid的导数有关,明明还有输入i为什么不提?因为如果是多层神经网络的中间某层的某个节点,那么就没有输入什么事了。所以产生影响的就是刚刚提的三个因素。
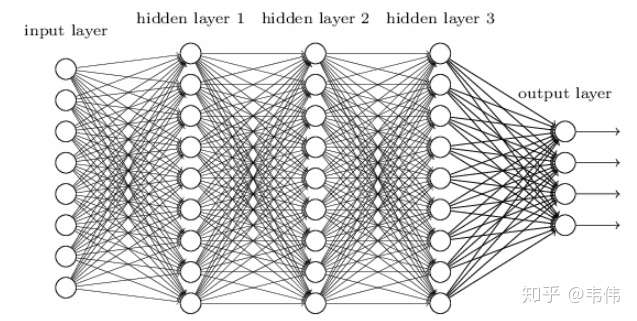
再详细点描述,如图,多层神经网络:
参考:PENG:神经网络训练中的梯度消失与梯度爆炸282 赞同 · 26 评论文章
假设(假设每一层只有一个神经元且对于每一层 ,其中
为sigmoid函数),如图:

则:
看一下sigmoid函数的求导之后的样子:
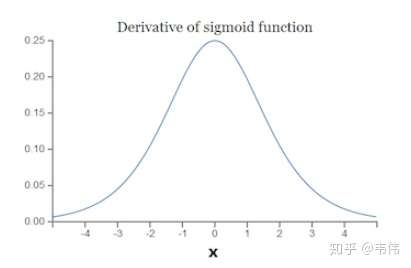
发现sigmoid函数求导后最大最大也只能是0.25。
再来看W,一般我们初始化权重参数W时,通常都小于1,用的最多的应该是0,1正态分布吧。
所以
,多个小于1的数连乘之后,那将会越来越小,导致靠近输入层的层的权重的偏导几乎为0,也就是说几乎不更新,这就是梯度消失的根本原因。
再来看看梯度爆炸的原因,也就是说如果
时,连乘下来就会导致梯度过大,导致梯度更新幅度特别大,可能会溢出,导致模型无法收敛。sigmoid的函数是不可能大于1了,上图看的很清楚,那只能是w了,这也就是经常看到别人博客里的一句话,初始权重过大,一直不理解为啥。。现在明白了。
但梯度爆炸的情况一般不会发生,对于sigmoid函数来说, 的大小也与w有关,因为
,除非该层的输入值
在一直一个比较小的范围内。
其实梯度爆炸和梯度消失问题都是因为网络太深,网络权值更新不稳定造成的,本质上是因为梯度反向传播中的连乘效应。
==所以,总结一下,为什么会发生梯度爆炸和消失:==
本质上是因为神经网络的更新方法,梯度消失是因为反向传播过程中对梯度的求解会产生sigmoid导数和参数的连乘,sigmoid导数的最大值为0.25,权重一般初始都在0,1之间,乘积小于1,多层的话就会有多个小于1的值连乘,导致靠近输入层的梯度几乎为0,得不到更新。梯度爆炸是也是同样的原因,只是如果初始权重大于1,或者更大一些,多个大于1的值连乘,将会很大或溢出,导致梯度更新过大,模型无法收敛。
1.3 梯度消失、爆炸解决方案?
参考:DoubleV:详解深度学习中的梯度消失、爆炸原因及其解决方法
- 预训练加微调
- 梯度剪切、正则
解决方案一(预训练加微调):
提出采取无监督逐层训练方法,其基本思想是每次训练一层隐节点,训练时将上一层隐节点的输出作为输入,而本层隐节点的输出作为下一层隐节点的输入,此过程就是逐层“预训练”(pre-training);在预训练完成后,再对整个网络进行“微调”(fine-tunning)。
Hinton在训练深度信念网络(Deep Belief Networks中,使用了这个方法,在各层预训练完成后,再利用BP算法对整个网络进行训练。此思想相当于是先寻找局部最优,然后整合起来寻找全局最优,此方法有一定的好处,但是目前应用的不是很多了。
解决方案二(梯度剪切、正则):
梯度剪切这个方案主要是针对梯度爆炸提出的,其思想是设置一个梯度剪切阈值,然后更新梯度的时候,如果梯度超过这个阈值,那么就将其强制限制在这个范围之内。这可以防止梯度爆炸。
正则化是通过对网络权重做正则限制过拟合,仔细看正则项在损失函数的形式:
其中,
是指正则项系数,因此,如果发生梯度爆炸,权值的范数就会变的非常大,通过正则化项,可以部分限制梯度爆炸的发生。
注:事实上,在深度神经网络中,往往是梯度消失出现的更多一些
解决方案三(改变激活函数):
首先说明一点,tanh激活函数不能有效的改善这个问题,先来看tanh的形式:
再来看tanh的导数图像:
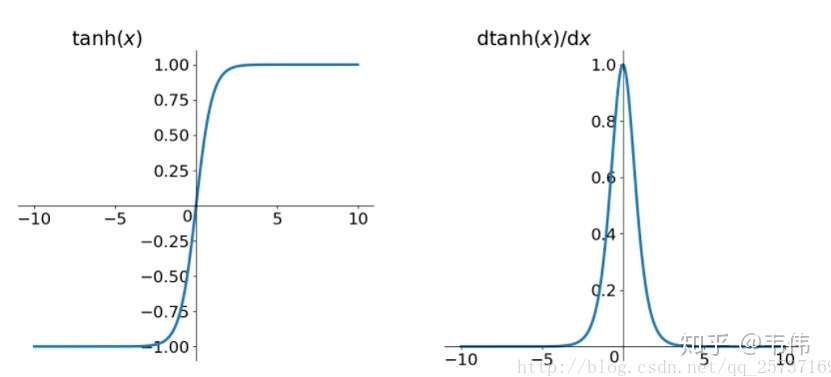
发现虽然比sigmoid的好一点,sigmoid的最大值小于0.25,tanh的最大值小于1,但仍是小于1的,所以并不能解决这个问题。
Relu:思想也很简单,如果激活函数的导数为1,那么就不存在梯度消失爆炸的问题了,每层的网络都可以得到相同的更新速度,relu就这样应运而生。先看一下relu的数学表达式:
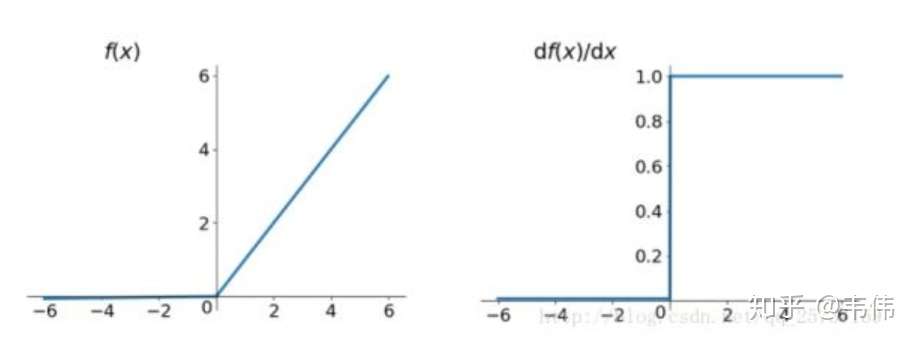
从上图中,我们可以很容易看出,relu函数的导数在正数部分是恒等于1的,因此在深层网络中使用relu激活函数就不会导致梯度消失和爆炸的问题。
relu的主要贡献在于:
- 解决了梯度消失、爆炸的问题
- 计算方便,计算速度快
- 加速了网络的训练
同时也存在一些缺点:
- 由于负数部分恒为0,会导致一些神经元无法激活(可通过设置小学习率部分解决)
- 输出不是以0为中心的
leakrelu
leakrelu就是为了解决relu的0区间带来的影响,其数学表达为:
其中k是leak系数,一般选择0.1或者0.2,或者通过学习而来解决死神经元的问题。
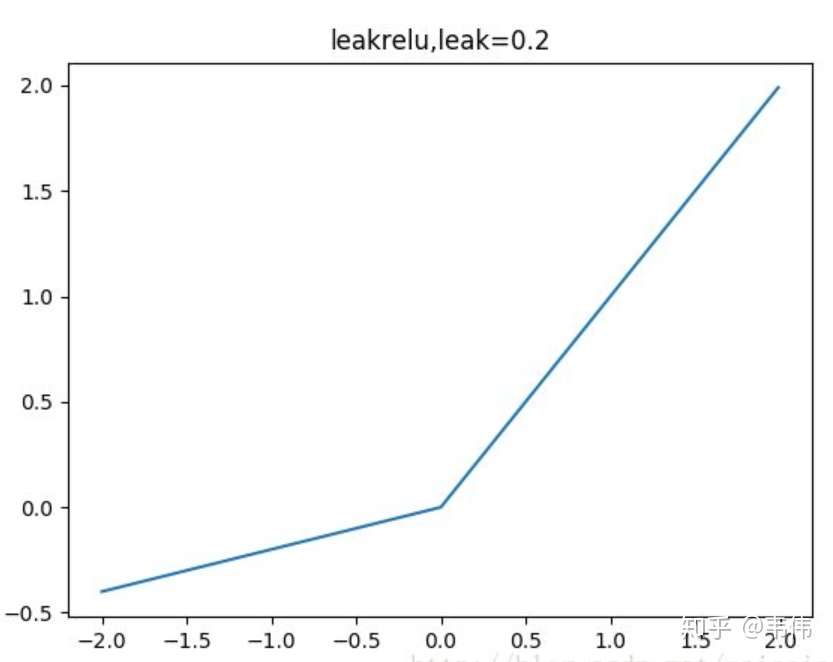
leakrelu解决了0区间带来的影响,而且包含了relu的所有优点
elu
elu激活函数也是为了解决relu的0区间带来的影响,其数学表达为:
其函数及其导数数学形式为:
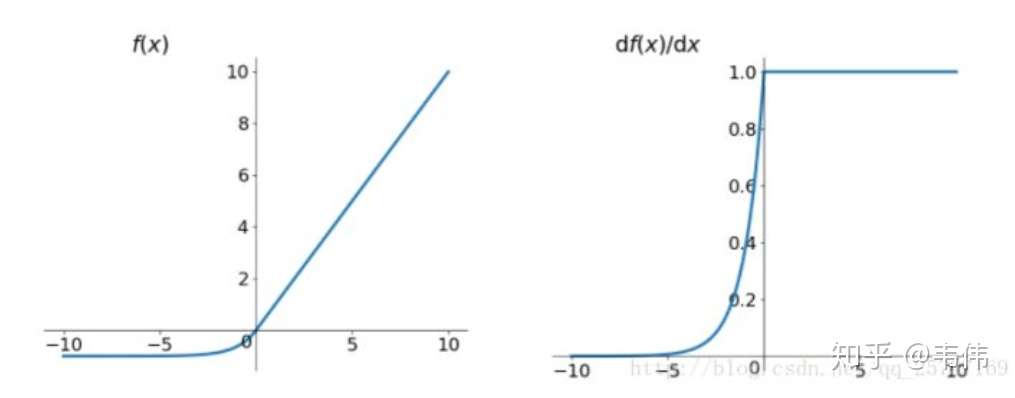
但是elu相对于leakrelu来说,计算要更耗时间一些,因为有e。
解决方案四(batchnorm):【梯度消失】
Batchnorm是深度学习发展以来提出的最重要的成果之一了,目前已经被广泛的应用到了各大网络中,具有加速网络收敛速度,提升训练稳定性的效果,Batchnorm本质上是解决反向传播过程中的梯度问题。batchnorm全名是batch normalization,简称BN,即批规范化,通过规范化操作将输出信号x规范化到均值为0,方差为1保证网络的稳定性。
具体的batchnorm原理非常复杂,在这里不做详细展开,此部分大概讲一下batchnorm解决梯度的问题上。具体来说就是反向传播中,经过每一层的梯度会乘以该层的权重,举个简单例子:
正向传播中,那么反向传播中,
,反向传播式子中有w的存在,所以
的大小影响了梯度的消失和爆炸,batchnorm就是通过对每一层的输出做scale和shift的方法,通过一定的规范化手段,把每层神经网络任意神经元这个输入值的分布【假设原始是正态分布】强行拉回到接近均值为0方差为1的标准正太分布,即严重偏离的分布强制拉回比较标准的分布,
这样使得激活输入值落在非线性函数对输入比较敏感的区域,这样输入的小变化就会导致损失函数较大的变化,使得让梯度变大,避免梯度消失问题产生,而且梯度变大意味着学习收敛速度快,能大大加快训练速度。
解决方案五(残差结构):
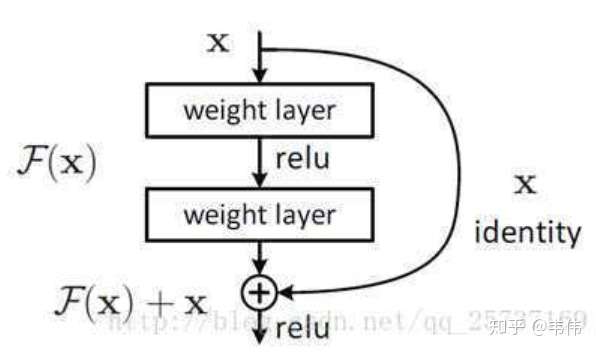
如图,把输入加入到某层中,这样求导时,总会有个1在,这样就不会梯度消失了。
式子的第一个因子 表示的损失函数到达 L
的梯度,小括号中的1表明短路机制可以无损地传播梯度,而另外一项残差梯度则需要经过带有weights的层,梯度不是直接传递过来的。残差梯度不会那么巧全为-1,而且就算其比较小,有1的存在也不会导致梯度消失。所以残差学习会更容易。
注:上面的推导并不是严格的证,只为帮助理解
==解决方案六(LSTM):==
在介绍这个方案之前,有必要来推导一下RNN的反向传播,因为关于梯度消失的含义它跟DNN不一样!不一样!不一样!
先推导再来说,从这copy的:沉默中的思索:RNN梯度消失和爆炸的原因565 赞同
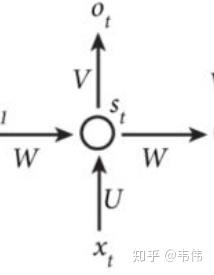
RNN结构如图:
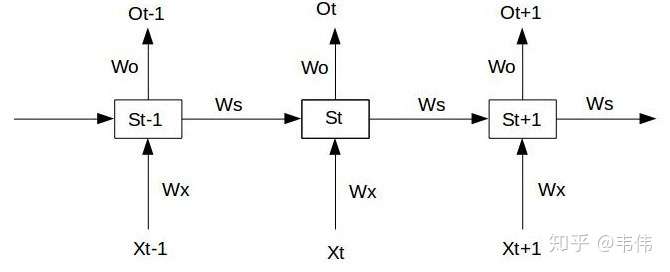
假设我们的时间序列只有三段,
为给定值,神经元没有激活函数,则RNN最简单的前向传播过程如下:
假设在t=3时刻,损失函数为 。
则对于一次训练任务的损失函数为 ,即每一时刻损失值的累加。
使用随机梯度下降法训练RNN其实就是对 、
、
以及
求偏导,并不断调整它们以使L尽可能达到最小的过程。
现在假设我们我们的时间序列只有三段,t1,t2,t3。
我们只对t3时刻的 求偏导(其他时刻类似):
可以看出对于
求偏导并没有长期依赖,但是对于
求偏导,会随着时间序列产生长期依赖。因为
随着时间序列向前传播,而
又是
的函数。
根据上述求偏导的过程,我们可以得出任意时刻对 求偏导的公式:
任意时刻对 求偏导的公式同上。
如果加上激活函数, ,则
=
激活函数tanh和它的导数图像在上面已经说过了,所以原因在这就不赘述了,还是一样的,激活函数导数小于1。
==现在来解释一下,为什么说RNN和DNN的梯度消失问题含义不一样?==
- 先来说DNN中的反向传播:在上文的DNN反向传播中,我推导了两个权重的梯度,第一个梯度是直接连接着输出层的梯度,求解起来并没有梯度消失或爆炸的问题,因为它没有连乘,只需要计算一步。第二个梯度出现了连乘,也就是说越靠近输入层的权重,梯度消失或爆炸的问题越严重,可能就会消失会爆炸。一句话总结一下,DNN中各个权重的梯度是独立的,该消失的就会消失,不会消失的就不会消失。
- 再来说RNN:RNN的特殊性在于,它的权重是共享的。抛开W_o不谈,因为它在某时刻的梯度不会出现问题(某时刻并不依赖于前面的时刻),但是W_s和W_x就不一样了,每一时刻都由前面所有时刻共同决定,是一个相加的过程,这样的话就有个问题,当距离长了,计算最前面的导数时,最前面的导数就会消失或爆炸,但当前时刻整体的梯度并不会消失,因为它是求和的过程,当下的梯度总会在,只是前面的梯度没了,但是更新时,由于权值共享,所以整体的梯度还是会更新,通常人们所说的梯度消失就是指的这个,指的是当下梯度更新时,用不到前面的信息了,因为距离长了,前面的梯度就会消失,也就是没有前面的信息了,但要知道,整体的梯度并不会消失,因为当下的梯度还在,并没有消失。
- 一句话概括:RNN的梯度不会消失,RNN的梯度消失指的是当下梯度用不到前面的梯度了,但DNN靠近输入的权重的梯度是真的会消失。
说完了RNN的反向传播及梯度消失的含义,终于该说为什么LSTM可以解决这个问题了,这里默认大家都懂LSTM的结构,对结构不做过多的描述。见第三节。【LSTM通过它的“门控装置”有效的缓解了这个问题,这也就是为什么我们现在都在使用LSTM而非普通RNN。】
二、LSTM 框架结构
前言:
LSTM是RNN的一种变体,更高级的RNN,那么它的本质还是一样的,还记得RNN的特点吗,可以有效的处理序列数据,当然LSTM也可以,还记得RNN是如何处理有效数据的吗,是不是每个时刻都会把隐藏层的值存下来,到下一时刻的时候再拿出来用,这样就保证了,每一时刻含有上一时刻的信息,如图,我们把存每一时刻信息的地方叫做Memory Cell,中文就是记忆细胞,可以这么理解。
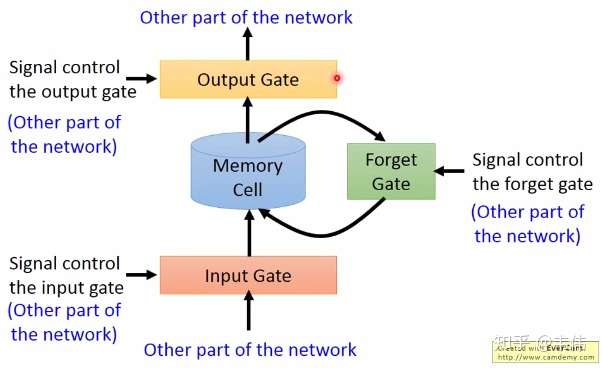
RNN什么信息它都存下来,因为它没有挑选的能力,而LSTM不一样,它会选择性的存储信息,因为它能力强,它有门控装置,它可以尽情的选择。如下图,普通RNN只有中间的Memory Cell用来存所有的信息,而从下图我们可以看到,LSTM多了三个Gate。
- Input Gate:输入门,在每一时刻从输入层输入的信息会首先经过输入门,输入门的开关会决定这一时刻是否会有信息输入到Memory Cell。
- Output Gate:输出门,每一时刻是否有信息从Memory Cell输出取决于这一道门。
- Forget Gate:遗忘门,每一时刻Memory Cell里的值都会经历一个是否被遗忘的过程,就是由该门控制的,如果打卡,那么将会把Memory Cell里的值清除,也就是遗忘掉。
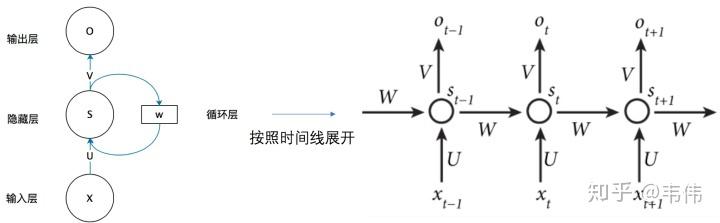
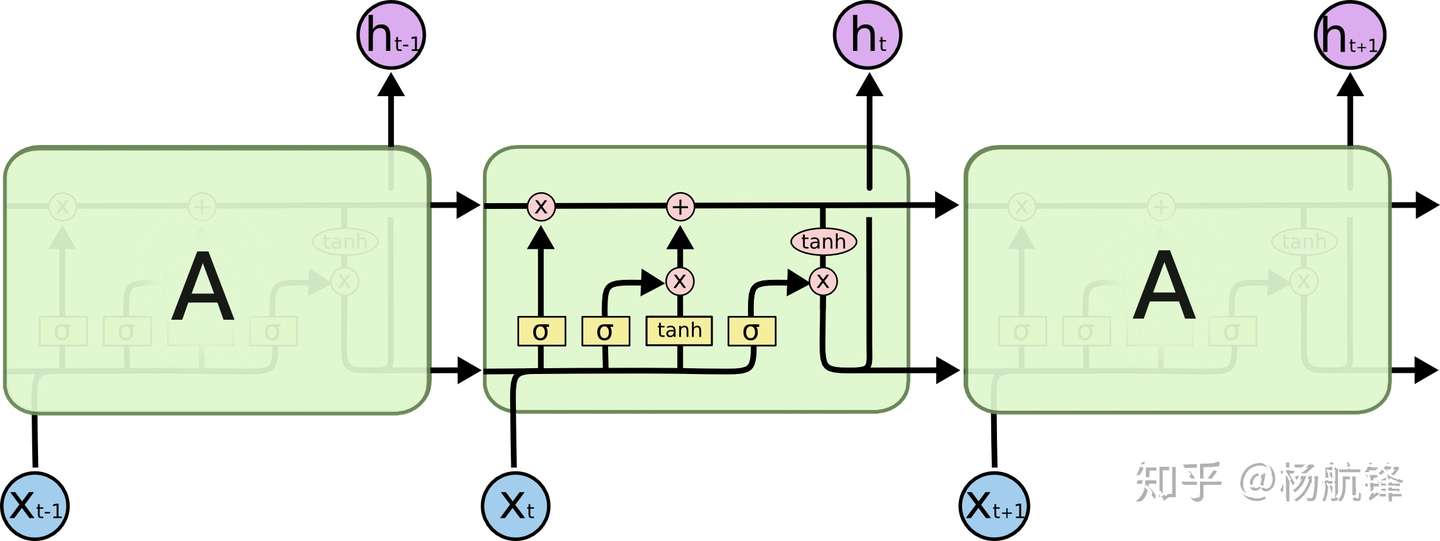
在了解LSTM的内部结构之前,我们需要先回顾一下普通RNN的结构,以免在这里很多读者被搞懵,如下:
我们可以看到,左边是为了简便描述RNN的工作原理而画的缩略图,右边是展开之后,每个时间点之间的流程图,注意,我们接下来看到的LSTM的结构图,是一个时间点上的内部结构,就是整个工作流程中的其中一个时间点,也就是如下图:
注意,上图是普通RNN的一个时间点的内部结构,上面已经讲过了公式和原理,LSTM的内部结构更为复杂,不过如果这么类比来学习,我认为也没有那么难。
- Cell:memory cell,也就是一个记忆存储的地方,这里就类似于普通RNN的
,都是用来存储信息的,这里面的信息都会保存到下一时刻,其实标准的叫法应该是
,因为这里对应神经网络里的隐藏层,所以是hidden的缩写,无论普通RNN还是LSTM其实t时刻的记忆细胞里存的信息,都应该被称为
是这一时刻的输出,也就是类似于普通RNN里的
- 四个
,这四个相辅相成,才造就了中间的Memory Cell里的值,你肯恩要问普通RNN里有个
作为输入,那LSTM的输入在哪?别着急,其实这四个
的参与。对了,在解释这四个分别是什么之前,我要先解释一下上图的所有这个符号:
都代表一个激活函数,LSTM里常用的激活函数有两个,一个是tanh,一个是sigmoid。
![[公式]](https://www.zhihu.com/equation?tex=Z%3Dtanh%28W%5Bx_t%2Ch_%7Bt-1%7D%5D%29%5C%5CZ_i%3D%5Csigma%28W_i%5Bx_t%2Ch_%7Bt-1%7D%5D%29%5C%5CZ_f%3D%5Csigma%28W_f%5Bx_t%2Ch_%7Bt-1%7D%5D%29%5C%5CZ_o%3D%5Csigma%28W_o%5Bx_t%2Ch_%7Bt-1%7D%5D%29%5C%5C)
是最为普通的输入,可以从上图中看到,
向量拼接,再与权重参数向量
点积,得到的值经过激活函数tanh最终会得到一个数值。
input gate的缩写i,所以也就是输入门的门控装置,
同样也是通过该时刻的输入
点积(注意每个门的权重向量都不一样,这里的下标i代表input的意思,也就是输入门)。得到的值经过激活函数sigmoid的最终会得到一个0-1之间的一个数值,用来作为输入门的控制信号。
- 以此类推,就不详细讲解
了,分别是缩写forget和output的门控装置,原理与上述输入门的门控装置类似。上面说了,只有
都是在0到1之间的数值,1表示该门完全打开,0表示该门完全关闭,

==LSTM迭代过程==
LSTM和GRU算法简单梳理🍭: https://zhuanlan.zhihu.com/p/72500407

:当前序列的隐藏状态、
:当前序列的输入数据、
:当前序列的细胞状态、
:
激活函数、
:
激活函数。
遗忘门:
输入门:
细胞状态更新:
输出门:
2.1 LSTM之遗忘门
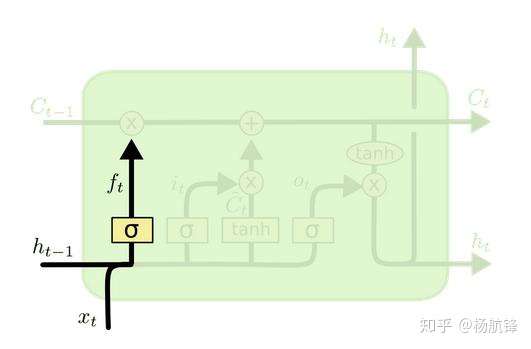
遗忘门是控制是否遗忘的,在
中即以一定的概率控制是否遗忘上一层的细胞状态。图中输入的有前一序列的隐藏状态
和当前序列的输入数据
,通过一个
激活函数得到遗忘门的输出
。因为
函数的取值在
之间,所以
表示的是遗忘前一序列细胞状态的概率,数学表达式为
2.2 LSTM之输入门
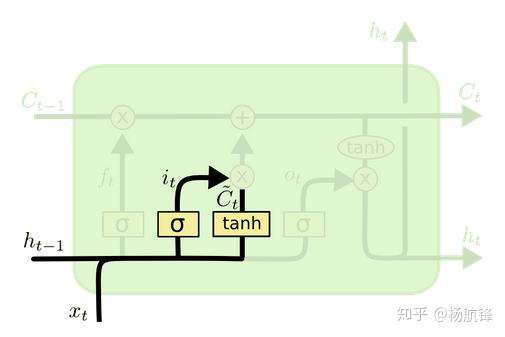
输入门是用来决定哪些数据是需要更新的,由
层决定;然后,一个
层为新的候选值创建一个向量
,这些值能够加入到当前细胞状态中,数学表达式为
2.3 LSTM之细胞状态更新
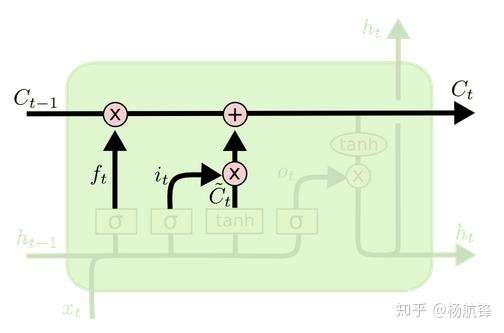
前面的遗忘门和输入门的结果都会作用于细胞状态
,在决定需要遗忘和需要加入的记忆之后,就可以更新前一序列的细胞状态
到当前细胞状态
了,前一序列的细胞状态
乘以遗忘门的输出
表示决定遗忘的信息,
表示新的记忆信息,数学表达式为:
2.4 LSTM之输出门
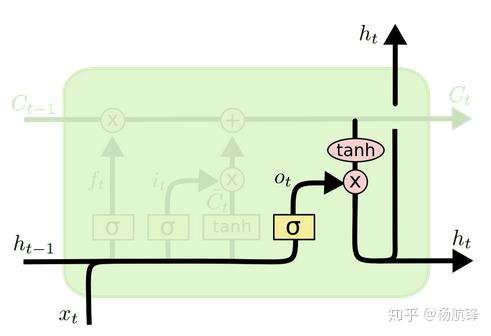
在得到当前序列的细胞状态
后,就可以计算当前序列的输出隐藏状态
了,隐藏状态
的更新由两部分组成,第一部分是
,它由前一序列的隐藏状态
和当前序列的输入数据
通过激活函数
得到,第二部分由当前序列的细胞状态
经过
激活函数后的结果组成,数学表达式为
三、GRU 框架结构
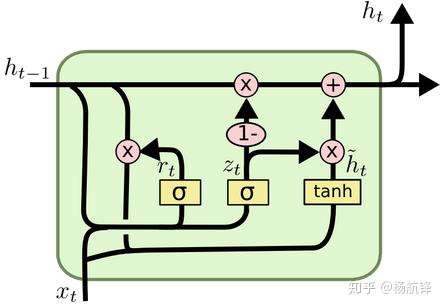
循环门单元(
),它组合了遗忘门和输入门到一个单独的更新门当中,也合并了细胞状态
和隐藏状态
,并且还做了一些其他的改变使得其模型比标准
模型更简单,其数学表达式式为:
首先介绍 的两个门,它们分别是重置门
和更新门
,计算方法与
中门的计算方法是一致的;然后是计算候选隐藏层
,该候选隐藏层和
中的
类似,都可以看成是当前时刻的新信息,其中
用来控制需要保留多少之前的记忆,如果
为
则表示
只保留当前序列的输入信息;最后
控制需要从前一序列的隐藏层
中遗忘多少信息和需要加入多少当前序列的隐藏层信息
,从而得到当前序列的输出隐藏层信息
,而
是没有输出门的。
GRU和LSTM的性能差不多,但GRU参数更少,更简单,所以训练效率更高。但是,如果数据的依赖特别长且数据量很大的话,LSTM的效果可能会稍微好一点,毕竟参数量更多。所以默认推荐使用LSTM。
参考资料⬇️
LSTM Q&A
1、为什么LSTM可以解决梯度消失和梯度爆炸?
参考(这个老哥说的是最好的):LSTM如何来避免梯度弥散和梯度爆炸?
- ==LSTM 中梯度的传播有很多条路径,
这条路径上只有逐元素相乘和相加的操作,梯度流最稳定==;但是其他路径(例如
)上梯度流与普通 RNN 类似,照样会发生相同的权重矩阵反复连乘。
- LSTM 刚提出时没有遗忘门,或者说相当于
,这时候在
直接相连的短路路径上,
可以无损地传递给
,从而这条路径上的梯度畅通无阻,不会消失。类似于 ResNet 中的残差连接。
- 但是在其他路径上,LSTM 的梯度流和普通 RNN 没有太大区别,依然会爆炸或者消失。由于总的远距离梯度 = 各条路径的远距离梯度之和,即便其他远距离路径梯度消失了,只要保证有一条远距离路径(就是上面说的那条高速公路)梯度不消失,总的远距离梯度就不会消失(正常梯度 + 消失梯度 = 正常梯度)。因此 LSTM 通过改善一条路径上的梯度问题拯救了总体的远距离梯度。
- 同样,因为总的远距离梯度 = 各条路径的远距离梯度之和,高速公路上梯度流比较稳定,但其他路径上梯度有可能爆炸,此时总的远距离梯度 = 正常梯度 + 爆炸梯度 = 爆炸梯度,因此 LSTM 仍然有可能发生梯度爆炸。不过,==由于 LSTM 的其他路径非常崎岖,和普通 RNN 相比多经过了很多次激活函数(导数都小于 1),因此 LSTM 发生梯度爆炸的频率要低得多==。实践中梯度爆炸一般通过梯度裁剪来解决。
- 对于现在常用的带遗忘门的 LSTM 来说,4 中的分析依然成立,而 3 分为两种情况:其一是遗忘门接近 1(例如模型初始化时会把 forget bias 设置成较大的正数,让遗忘门饱和),这时候远距离梯度不消失;其二是遗忘门接近 0,但这时模型是故意阻断梯度流的,这不是 bug 而是 feature(例如情感分析任务中有一条样本 “A,但是 B”,模型读到“但是”后选择把遗忘门设置成 0,遗忘掉内容 A,这是合理的)。当然,常常也存在 f 介于 [0, 1] 之间的情况,在这种情况下只能说 LSTM 改善(而非解决)了梯度消失的状况。
2、为什么LSTM模型中既存在sigmoid又存在tanh两种激活函数?
关于激活函数的选取,在LSTM中,遗忘门、输入门和输出门使用 Sigmoid函数作为激活函数;在生成候选记忆时,使用双曲正切函数tanh作为激活函数。值得注意的是,这两个激活函数都是饱和的也就是说在输入达到一定值的情况下,输出就不会发生明显变化了。如果是用非饱和的激活图数,例如ReLU,那么将难以实现门控的效果。
Sigmoid的输出在0-1之同,符合门控的物理定义,且当输入较大或较小时,其输出会非常接近1或0,从而保证该门开或关,在生成候选记亿时,
tanh函数,是因为其输出在-1-1之间,这与大多数场景下特征分布是0中心的吻合。此外,tanh函数在输入为0近相比 Sigmoid函数有更大的梯度,通常使模型收敛更快。
激活函数的选择也不是一成不变的。例如在原始的LSTM中,使用的激活函数是 Sigmoid函数的变种,h(x)=2sigmoid(x)-1,g(x)=4 sigmoid(x)-2,这两个函数的范国分别是[-1,1]和[-2,2]。并且在原始的LSTM中,只有输入门和输出门,没有遗忘门,其中输入经过输入门后是直接与记忆相加的,所以输入门控g(x)的值是0中心的。
后来经过大量的研究和实验,人们发现增加遗忘门对LSTM的性能有很大的提升且h(x)使用tanh比2 sigmoid(x)-1要好,所以现代的LSTM采用 Sigmoid和tanh作为激活函数。事实上在门控中,使用 Sigmoid函数是几乎所有现代神经网络模块的共同选择。例如在门控循环单元和注意力机制中,也广泛使用 Sigmoid i函数作为门控的激活函数。
为什么?
- 门是控制开闭的,全开时值为1,全闭值为0。用于遗忘和保留信息。
- 对于求值的激活函数无特殊要求。
能更换吗?
- 门是控制开闭的,全开时值为1,全闭值为0。用于遗忘和保留信息。门的激活函数只能是值域为0到1的,最常见的就是sigmoid。
- 对于求值的激活函数无特殊要求。
3、能不能把tanh换成relu?
不行?对于梯度爆炸的问题用梯度裁剪解决就行了。
- 会造成输出值爆炸。RNN共享参数矩阵,长程的话相当于多个相乘,最后输出类似于
,其中是
激活函数,如果
- 这里relu并不能解决梯度消失或梯度爆炸的问题。假设有t=3,最后一项输出反向传播对W求导,
。我们用最后一项做分析,即使使用了relu,
,还是会有两个