深度学习-NLP(4)BERT*-P1
Self - supervised Learning(BERT-P1)

每个人都应该熟悉监督学习,当我们做监督学习时,我们只有一个模型,这个模型的输入是x,输出是y。假设你今天想做情感分析,你就是让机器阅读一篇文章,而机器需要对这篇文章进行分类,是正面的还是负面的,你必须先找到大量的文章,你需要对所有的文章进行label。我们需要有标签和文章数据来训练监督模型。
"Self-supervised "是用另一种方式来监督,没有标签。假设我们只有一堆没有label的文章,但我们试图找到一种方法把它分成两部分。我们让其中一部分作为模型的输入数据,另一部分作为标签。
Masking Input
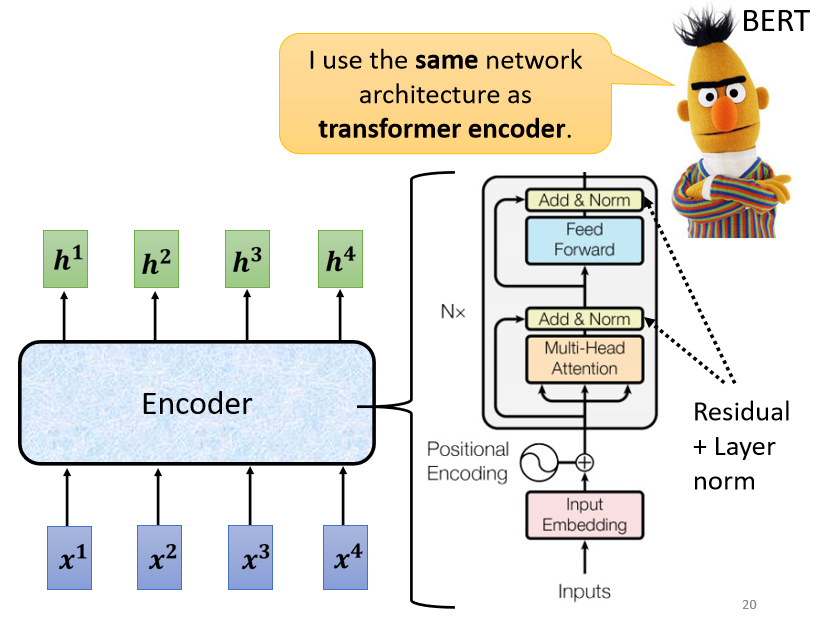
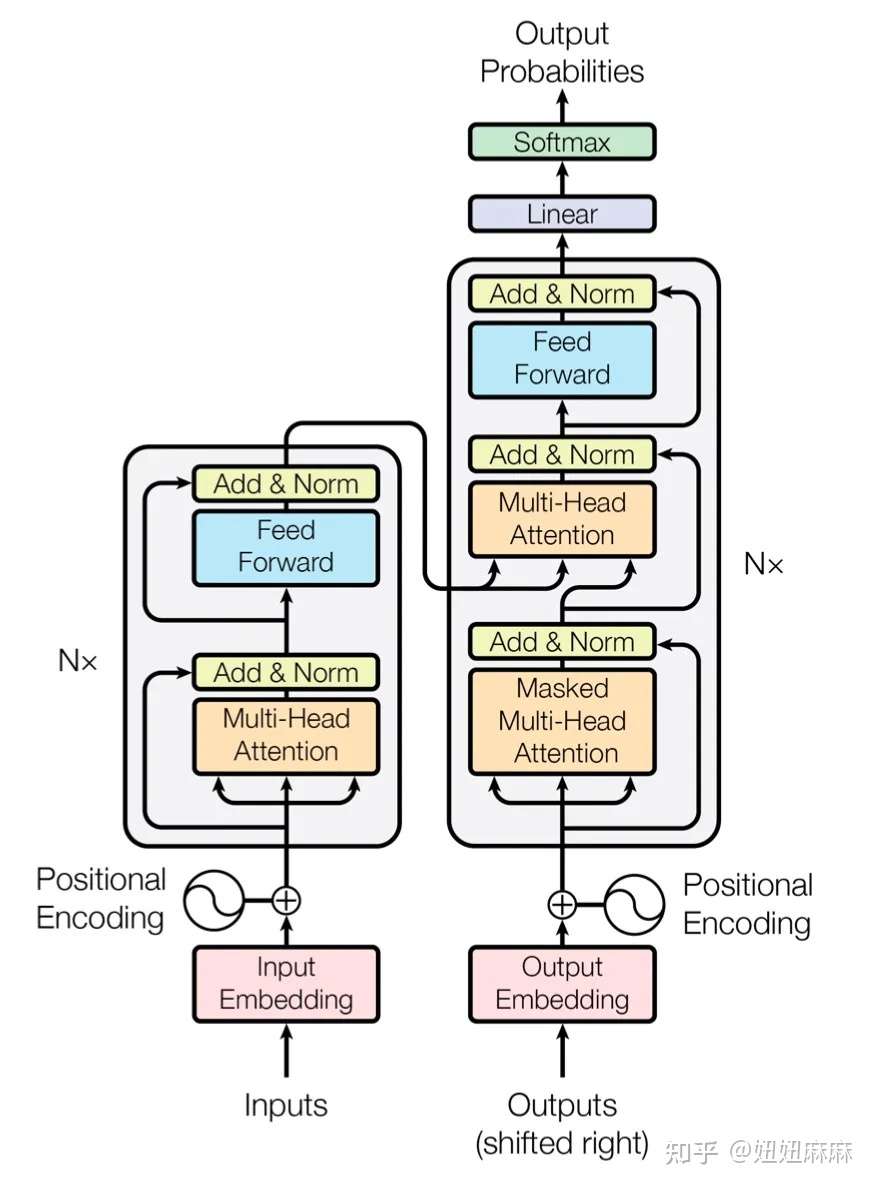
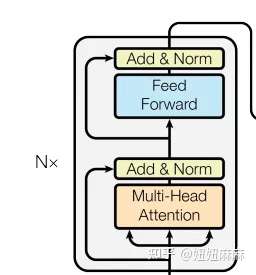
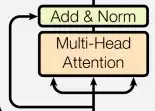
Self-supervised Learning是什么意思呢,我们直接拿BERT模型来说。 BERT是一个transformer的Encoder,我们已经讲过transformer了,我们也花了很多时间来介绍Encoder和Decoder,transformer中的Encoder它实际上是BERT的架构,它和transformer的Encoder完全一样,里面有很多Self-Attention和Residual connection,还有Normalization等等,那么,这就是BERT。

如果你已经忘记了Encoder里有哪些部件,你需要记住的关键点是,BERT可以输入一行向量,然后输出另一行向量,输出的长度与输入的长度相同 。 BERT一般用于自然语言处理,用于文本场景,所以一般来说,它的输入是一串文本,也是一串数据。
当我们真正谈论Self-Attention的时候,我们也说不仅文本是一种序列,而且语音也可以看作是一种序列,甚至图像也可以看作是一堆向量。BERT同样的想法是,不仅用于NLP,或者用于文本,它也可以用于语音和视频。
接下来我们需要做的是,随机盖住一些输入的文字,被mask的部分是随机决定的,例如,我们输入100个token,什么是token?在中文文本中,我们通常把一个汉字看作是一个token,当我们输入一个句子时,其中的一些词会被随机mask。

mask的具体实现有两种方法:

- 第一种方法是,用一个特殊的符号替换句子中的一个词,我们用 "MASK "标记来表示这个特殊符号,你可以把它看作一个新字,这个字完全是一个新词,它不在你的字典里,这意味着mask了原文。
- 另外一种方法,随机把某一个字换成另一个字。中文的 "湾"字被放在这里,然后你可以选择另一个中文字来替换它,它可以变成 "一 "字,变成 "天 "字,变成 "大 "字,或者变成 "小 "字,我们只是用随机选择的某个字来替换它
所以有两种方法来做mask,一种是添加一个特殊的标记 "MASK",另一种是用一个字来替换某个字。
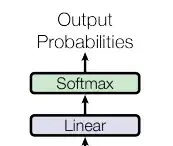
两种方法都可以使用。使用哪种方法也是随机决定的。因此,当BERT进行训练时,向BERT输入一个句子,先随机决定哪一部分的汉字将被mask。mask后,一样是输入一个序列,我们把BERT的相应输出看作是另一个序列,接下来,我们在输入序列中寻找mask部分的相应输出,然后,这个向量将通过一个==Linear transform==。

所谓的Linear transform是指,输入向量将与一个矩阵相乘,然后做softmax,输出一个分布。这与我们在Seq2Seq模型中提到的使用transformer进行翻译时的输出分布相同。输出是一个很长的向量,包含我们想要处理的每个汉字,每一个字都对应到一个分数。
在训练过程中。我们知道被mask的字符是什么,而BERT不知道,我们可以用一个one-hot vector来表示这个字符,并使输出和one-hot vector之间的交叉熵损失最小。

或者说得简单一点,我们实际上是在解决一个分类问题。现在,BERT要做的是,预测什么被盖住。被掩盖的字符,属于 "湾"类。在训练中,我们在BERT之后添加一个线性模型,并将它们一起训练。所以,BERT里面是一个transformer的Encoder,它有一堆参数。这两个需要共同训练,并试图预测被覆盖的字符是什么,这叫做mask。
Next Sentence Prediction
事实上,当我们训练BERT时,除了mask之外,我们还会使用另一种方法,这种额外的方法叫做==Next Sentence Prediction== 。
它的意思是,我们从数据库中拿出两个句子,这是我们通过在互联网上抓取和搜索文件得到的大量句子集合,我们在这两个句子之间添加一个特殊标记。这样,BERT就可以知道,这两个句子是不同的句子,因为这两个句子之间有一个分隔符。

我们还将在句子的开头添加一个特殊标记,这里我们用CLS来表示这个特殊标记。
现在,我们有一个很长的序列,包括两个句子,由SEP标记和前面的CLS标记分开。如果我们把它传给BERT,它应该输出一个序列,因为输入也是一个序列,这毕竟是Encoder的目的。我们将只看CLS的输出,我们将把它乘以一个Linear transform。

现在它必须做一个二分类问题,有两个可能的输出:是或不是。这个方法被称为Next Sentence Prediction ,所以我们需要预测,第二句是否是第一句的后续句。
然而,后来的研究发现,对于BERT要做的任务来说,Next Sentence Prediction 并没有真正的帮助。例如,有一篇论文叫 "Robustly Optimized BERT Approach",简称RoBERTa。在这篇论文中,它明确指出,实施Next Sentence Prediction ,几乎没有任何帮助。然后,这个概念不知不觉地成为主流。
在这之后,另一篇论文说下一句话预测没有用,所以在它之后的许多论文也开始说它没有用。例如,SCAN-BERT和XLNet都说Next Sentence Prediction 方法是无用的。它可能是无用的原因之一是,Next Sentence Prediction 太简单了,是一项容易的任务。
这个任务的典型方法是,首先随机选择一个句子,然后从数据库中或随机选择要与前一个句子相连的句子。通常,当我们随机选择一个句子时,它看起来与前一个句子有很大不同。对于BERT来说,预测两个句子是否相连并不是太难。因此,在训练BERT完成Next Sentence Prediction 的任务时,没有学到什么太有用的东西。
还有一种类似于Next Sentence Prediction 的方法,它在纸面上看起来更有用,它被称为==Sentence order prediction==,简称SOP。
这个方法的主要思想是,我们最初挑选的两个句子可能是相连的。可能有两种可能性:要么句子1在句子2后面相连,要么句子2在句子1后面相连。有两种可能性,我们问BERT是哪一种。
也许因为这个任务更难,它似乎更有效。它被用在一个叫ALBERT的模型中,这是BERT的高级版本。由于ALBERT这个名字与爱因斯坦相似,我在幻灯片中放了一张爱因斯坦的图片。
BERT学了什么?
当我们训练时,我们要求BERT学习两个任务。
一个是掩盖一些字符,具体来说是汉字,然后要求它填补缺失的字符。
另一个任务表明它能够预测两个句子是否有顺序关系。
所以总的来说,BERT它学会了如何填空。BERT的神奇之处在于,在你训练了一个填空的模型之后,它还可以用于其他任务。这些任务不一定与填空有关,也可能是完全不同的任务,但BERT仍然可以用于这些任务,这些任务是BERT实际使用的任务,它们被称为==Downstream Tasks==(下游任务),以后我们将谈论一些Downstream Tasks 的例子。

所谓的 "Downstream Tasks "是指,你真正关心的任务。但是,当我们想让BERT学习做这些任务时,我们仍然需要一些标记的信息。
总之,BERT只是学习填空,但是,以后可以用来做各种你感兴趣的Downstream Tasks 。它就像胚胎中的干细胞,它有各种无限的潜力,虽然它还没有使用它的力量,它只能填空,但以后它有能力解决各种任务。我们只需要给它一点数据来激发它,然后它就能做到。
BERT怎么测试性能?
BERT分化成各种任务的功能细胞,被称为==Fine-tune==(微调) 。所以,我们经常听到有人说,他对BERT进行了微调,也就是说他手上有一个BERT,他对这个BERT进行了微调,使它能够完成某种任务,与微调相反,在微调之前产生这个BERT的过程称为==预训练==。所以,生成BERT的过程就是Self-supervised学习。但是,你也可以称之为预训练。
好的,在我们谈论如何微调BERT之前,我们应该先看看它的能力。今天,为了测试Self-supervised学习的能力,通常,你会在多个任务上测试它。因为我们刚才说,BERT就像一个胚胎干细胞,它要分化成各种任务的功能细胞,我们通常不会只在一个任务上测试它的能力,你会让这个BERT分化成各种任务的功能细胞,看看它在每个任务上的准确性,然后我们取其平均值,得到一个总分。这种不同任务的集合,,我们可以称之为任务集。任务集中最著名的基准被称为==GLUE==,它是General Language Understanding Evaluation的缩写。

在GLUE中,总共有9个任务。一般来说,你想知道像BERT这样的模型是否被训练得很好。所以,你实际上会得到9个模型,用于9个单独的任务。你看看这9个任务的平均准确率,然后,你得到一个值。这个值代表这个Self-supervised模型的性能。让我们看看BERT在GLUE上的性能。

有了BERT,GLUE得分,也就是9个任务的平均得分,确实逐年增加。在这张图中,,横轴表示不同的模型,这里列出了,你可以发现,除了ELMO和GPT,其他的还有很多BERT,各种BERT。
黑色的线,表示人类的工作,也就是人类在这个任务上的准确度,那么,我们把这个当作1,这里每一个点代表一个任务,那么,你为什么要和人类的准确度进行比较呢?
人类的准确度是1,如果他们比人类好,这些点的值就会大于1,如果他们比人类差,这些点的值就会小于1,这是因为这些任务,其评价指标可能不是准确度。每个任务使用的评价指标是不同的,它可能不是准确度。如果我们只是比较它们的值,可能是没有意义的。所以,这里我们看的是人类之间的差异。所以,你会发现,在原来的9个任务中,只有1个任务,机器可以比人类做得更好。随着越来越多的技术被提出,越来越多的,还有3个任务可以比人类做得更好。对于那些远不如人类的任务,,它们也在逐渐追赶。
蓝色曲线表示机器GLUE得分的平均值。还发现最近的一些强势模型,例如XLNET,甚至超过了人类。当然,这只是这些数据集的结果,并不意味着机器真的在总体上超过了人类。它在这些数据集上超过了人类。这意味着这些数据集并不能代表实际的表现,而且难度也不够大。所以,在GLUE之后,有人做了Super GLUE。他们找到了更难的自然语言处理任务,让机器来解决。好了!展示这幅图的意义主要是告诉大家,有了BERT这样的技术,机器在自然语言处理方面的能力确实又向前迈进了一步。
How to use BERT
Case 1: Sentiment analysis
第一个案例是这样的,我们假设我们的Downstream Tasks 是输入一个序列,然后输出一个class,这是一个分类问题。比如说 Sentiment analysis 情感分析,就是给机器一个句子,让它判断这个句子是正面的还是负面的。

对于BERT来说,它是如何解决情感分析的问题的?
你只要给它一个句子,也就是你想用它来判断情绪的句子,然后把CLS标记放在这个句子的前面,我刚才提到了CLS标记。 我们把CLS标记放在前面,扔到BERT中,这4个输入实际上对应着4个输出。然后,我们只看CLS的部分。CLS在这里输出一个向量,我们对它进行Linear transform,也就是将它乘以一个Linear transform的矩阵,这里省略了Softmax。
然而,在实践中,你必须为你的Downstream Tasks 提供标记数据,换句话说,BERT没有办法从头开始解决情感分析问题,你仍然需要向BERT提供一些标记数据,你需要向它提供大量的句子,以及它们的正负标签,来训练这个BERT模型。
在训练的时候,Linear transform和BERT模型都是利用Gradient descent来更新参数的。
- Linear transform的参数是随机初始化的
- 而BERT的参数是由学会填空的BERT初始化的。
每次我们训练模型的时候,我们都要初始化参数,我们利用梯度下降来更新这些参数,然后尝试minimize loss,例如,我们正在做情感分类,但是,我们现在有BERT。我们不必随机初始化所有的参数。,我们唯一随机初始化的部分是Linear这里。BERT的骨干是一个巨大的transformer的Encoder。这个网络的参数不是随机初始化的。把学过填空的BERT参数,放到这个地方的BERT中作为参数初始化。
我们为什么要这样做呢?为什么要用学过填空的BERT,再放到这里呢?
最直观和最简单的原因是,它比随机初始化新参数的网络表现更好。当你把学会填空的BERT放在这里时,它将获得比随机初始化BERT更好的性能。

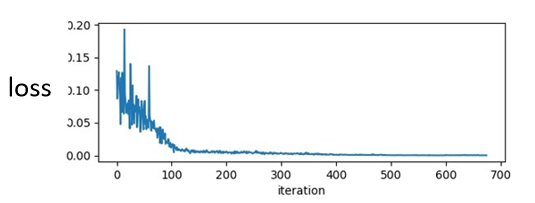
在这里有篇文章中有一个例子。横轴是训练周期,纵轴是训练损失,到目前为止,大家对这种图一定很熟悉,随着训练的进行,损失当然会越来越低,这个图最有趣的地方是,有各种任务。我们不会解释这些任务的细节,我只想说明有各种任务。
- "fine-tune"是指模型被用于预训练,这是网络的BERT部分。该部分的参数是由学习到的BERT的参数来初始化的,以填补空白。
- scratch表示整个模型,包括BERT和Encoder部分都是随机初始化的。
首先,在训练网络时,scratch与用学习填空的BERT初始化的网络相比,损失下降得比较慢,最后,用随机初始化参数的网络的损失仍然高于用学习填空的BERT初始化的参数。
- 当你进行Self-supervised学习时,你使用了大量的无标记数据。
- 另外,Downstream Tasks 需要少量的标记数据。
所谓的 "半监督 "是指,你有大量的无标签数据和少量的有标签数据,这种情况被称为 "半监督",所以使用BERT的整个过程是连续应用Pre-Train和Fine-Tune,它可以被视为一种半监督方法。
Case 2 :POS tagging
第二个案例是,输入一个序列,然后输出另一个序列,而输入和输出的长度是一样的。我们在讲Self-Attention的时候,也举了类似的例子。 例如,==POS tagging==。

POS tagging的意思是词性标记。你给机器一个句子,它必须告诉你这个句子中每个词的词性,即使这个词是相同的,也可能有不同的词性。
你只需向BERT输入一个句子。之后,对于这个句子中的每一个标记,它是一个中文单词,有一个代表这个单词的相应向量。然后,这些向量会依次通过Linear transform和Softmax层。最后,网络会预测给定单词所属的类别,例如,它的词性。
当然,类别取决于你的任务,如果你的任务不同,相应的类别也会不同。接下来你要做的事情和案例1完全一样。换句话说,你需要有一些标记的数据。这仍然是一个典型的分类问题。唯一不同的是,BERT部分,即网络的Encoder部分,其参数不是随机初始化的。在预训练过程中,它已经找到了不错的参数。
当然,我们在这里展示的例子属于自然语言处理。但是,你可以把这些例子改成其他任务,例如,你可以把它们改成语音任务,或者改成计算机视觉任务。我在Self-supervised Learning一节中提到,语音、文本和图像都可以表示为一排向量。虽然下面的例子是文字,但这项技术不仅限于处理文字,它还可以用于其他任务,如计算机视觉。
Case 3:Natural Language Inference
在案例3中,模型输入两个句子,输出一个类别。好了,第三个案例以两个句子为输入,输出一个类别,什么样的任务采取这样的输入和输出? 最常见的是Natural Language Inference ,它的缩写是NLI

机器要做的是判断,是否有可能从前提中推断出假设。这个前提与这个假设相矛盾吗?或者说它们不是相矛盾的句子?
在这个例子中,我们的前提是,一个人骑着马,然后他跳过一架破飞机,这听起来很奇怪。但这个句子实际上是这样的。这是一个基准语料库中的例子。
这里的假设是,这个人在一个餐馆。所以推论说这是一个矛盾。
所以机器要做的是,把两个句子作为输入,并输出这两个句子之间的关系。这种任务很常见。它可以用在哪里呢?例如,舆情分析。给定一篇文章,下面有一个评论,这个消息是同意这篇文章,还是反对这篇文章?该模型想要预测的是每条评论的位置。事实上,有很多应用程序接收两个句子,并输出一个类别。
BERT是如何解决这个问题的?你只要给它两个句子,我们在这两个句子之间放一个特殊的标记,并在最开始放CLS标记。

这个序列是BERT的输入。但我们只把CLS标记作为Linear transform的输入。它决定这两个输入句子的类别。对于NLI,你必须问,这两个句子是否是矛盾的。它是用一些预先训练好的权重来初始化的。
Case 4:Extraction-based Question Answering (QA)
如果你不理解前面的案例,就忘掉它们。这第四个案例,就是我们在作业7中要做的。作业7是一个问题回答系统。也就是说,在机器读完一篇文章后,你问它一个问题,它将给你一个答案。
但是,这里的问题和答案稍有限制。这是Extraction-based的QA。也就是说,我们假设答案必须出现在文章中。答案必须是文章中的一个片段。
在这个任务中,一个输入序列包含一篇文章和一个问题,文章和问题都是一个序列。对于中文来说,每个d代表一个汉字,每个q代表一个汉字。你把d和q放入QA模型中,我们希望它输出两个正整数s和e。根据这两个正整数,我们可以直接从文章中截取一段,它就是答案。这个片段就是正确的答案。

这听起来很疯狂,但是,这是现在使用的一个相当标准的方法。六年前,当我第一次听说这个机制可以解决QA任务时,我简直不敢相信。但是,无论如何,这是今天一个非常普遍的方法。
好吧,如果你仍然不明白我在说什么,更具体地说,这里有一个问题和一篇文章,正确答案是 "gravity"。机器如何输出正确答案?

你的保证模型应该输出,s等于17,e等于17,来表示gravity。因为它是整篇文章中的第17个词,所以s等于17,e等于17,意味着输出第17个词作为答案。或者举另一个例子,答案是,"within a cloud",这是文章中的第77至79个词。你的模型要做的是,输出77和79这两个正整数,那么文章中从第77个词到第79个词的分割应该是最终的答案。这就是作业7要你做的。当然,我们不是从头开始训练QA模型,为了训练这个QA模型,我们使用BERT预训练的模型。

这个解决方案是这样的。对于BERT来说,你必须向它展示一个问题,一篇文章,以及在问题和文章之间的一个特殊标记,然后我们在开头放一个CLS标记。在这个任务中,你唯一需要从头训练的只有两个向量。"从头训练 "是指随机初始化。这里我们用橙色向量和蓝色向量来表示,这两个向量的长度与BERT的输出相同。假设BERT的输出是768维的向量,这两个向量也是768维的向量。那么,如何使用这两个向量?

首先,计算这个橙色向量和那些与文件相对应的输出向量的内积,由于有3个代表文章的标记,它将输出三个向量,计算这三个向量与橙色向量的内积,你将得到三个值,然后将它们通过softmax函数,你将得到另外三个值。
这个内积和attention很相似,你可以把橙色部分看成是query,黄色部分看成是key,这是一个attention,那么我们应该尝试找到分数最大的位置,就是这里,橙色向量和d2的内积,如果这是最大值,s应该等于2,你输出的起始位置应该是2蓝色部分做的是完全一样的事情。

蓝色部分代表答案的终点,我们计算这个蓝色向量与文章对应的黄色向量的内积,然后,我们在这里也使用softmax,最后,找到最大值,如果第三个值是最大的,e应该是3,正确答案是d2和d3。
因为答案必须在文章中,如果答案不在文章中,你就不能使用这个技巧。这就是一个QA模型需要做的。注意,这两个向量是随机初始化的,而BERT是通过它预先训练的权重初始化的。
Q&A
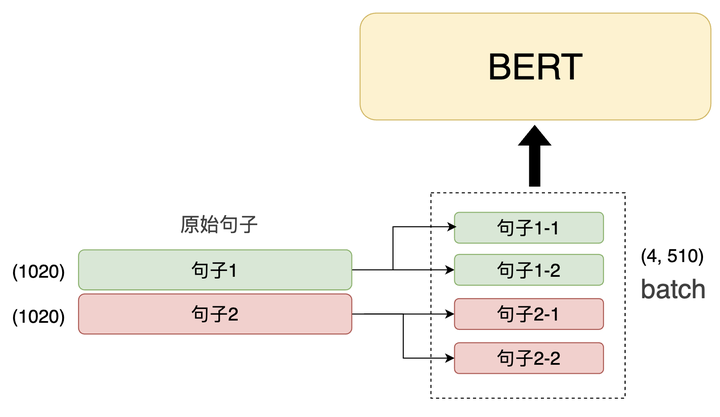
Q:==BERT的输入长度有限制吗? ==
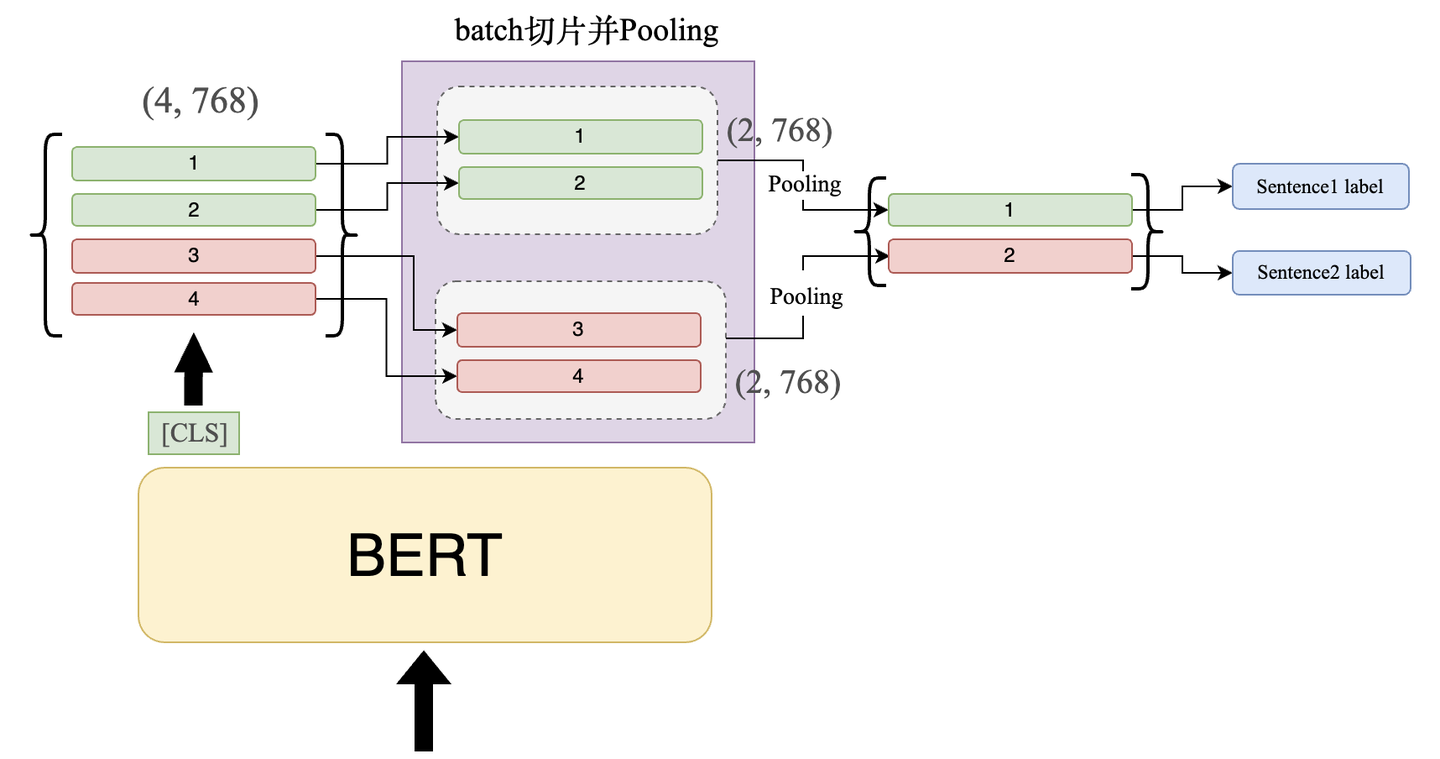
A:理论上,没有。在现实中,是的,在理论上,因为BERT模型,是一个transformer的Encoder,所以它可以输入很长的序列,只要你必须能够做Self-Attention,但Self-Attention的计算复杂性是非常高的。所以你会发现,在实践中,BERT实际上不能输入太长的序列,你最多可以输入512长度的序列,如果你输入一个512长度的序列,Self-Attention在中间就要产生512乘以512大小的Attention Metric,那么你可能会被计算所淹没。所以实际上它的长度不是无限的。在助教的程序中,已经为大家处理了这个问题。我们限制了BERT的输入长度,而且用一篇文章来训练需要很长的时间。然后每次,我们只取其中的一段进行训练。我们不会将整篇文章输入BERT。因为你想要的距离太长了,你的训练会有问题。
Q: "它与填空题有什么关系?
A:",哇,这个问题很好。,你会认为这个填空题只是一个填空题。但我要在这里做一个Q&A。,这两件事之间有什么关系呢?这里先卖个关子,待会会试着回答你。
Training BERT is challenging!
BERT是这样一个著名的模型,它可以做任何事情,那么你可能会认为BERT,在预训练中,它只是填空题,但是,你自己真的不能把它训练起来。
首先,谷歌最早的BERT,它使用的数据规模已经很大了,它的数据中包含了30亿个词汇,30亿个词汇有多少?,是《哈利波特全集》的3000倍。,《哈利波特全集》大约是100万个词汇。,那么谷歌在训练BERT时,最早的BERT,它使用的数据量是《哈利波特全集》的3000倍。
所以你处理起来会比较痛苦,更痛苦的是训练过程,为什么我知道训练过程是痛苦的呢,因为我们实验室有一个学生,他其实是助教之一,他自己试着训练一个BERT,他觉得他不能重现谷歌的结果,好,那么在这个图中,纵轴代表GLUE分数,我们刚才讲到GLUE,对吧?有9个任务,平均有9个任务,,平均分数就叫GLUE分数,好的,那么蓝线就是,谷歌原来的BERT的GLUE分数。
那么我们的目标其实不是实现BERT,我们的目标是实现ALBERT。ALBERT是一个高级版本,是橙色的线,蓝线是我们自己训练的ALBERT,但是我们实际训练的不是最大版本,BERT有一个base版本和一个large版本。对于大版本,我们很难自己训练它,所以我们尝试用最小的版本来训练,看它是否与谷歌的结果相同。
你可能会说这30亿个数据,30亿个词似乎有很多数据。实际上,因为它是无标签数据,所以你只是从互联网上整理了一堆文本,有相同的信息量。所以你要爬上这个级别的信息并不难,难的是训练过程

好的,这个横轴是训练过程,参数更新多少次,大约一百万次的更新,需要多长时间,用TPU运行8天,所以你的TPU要运行8天,如果你在Colab上做,这个至少要运行200天,你甚至可能到明年才能得到结果。
所以,你真的很难自己训练这种BERT模型。幸运的是,作业只是对它进行微调。你可以在Colab上进行微调,在Colab上微调BERT只需要半小时到一小时。但是,如果你想从头开始训练它,也就是说,训练它做填空题,这将需要大量的时间,而且,你不能在Colab上自己完成它。
BERT Embryology (胚胎學)
谷歌已经训练了BERT,而且这些Pre-Train模型是公开的,我们自己训练一个,结果和谷歌的BERT差不多,这有什么意义呢?其实是想建立==BERT胚胎学==。"BERT胚胎学是什么意思?"
 我们知道在BERT的训练过程中需要非常大的计算资源,所以我们想知道有没有可能,节省这些计算资源?有没有可能让它训练得更快?,要知道如何让它训练得更快,也许我们可以从观察它的训练过程开始。
我们知道在BERT的训练过程中需要非常大的计算资源,所以我们想知道有没有可能,节省这些计算资源?有没有可能让它训练得更快?,要知道如何让它训练得更快,也许我们可以从观察它的训练过程开始。
过去没有人观察过BERT的训练过程。因为在谷歌的论文中,他们只是告诉你,我有这个BERT。然后它在各种任务中做得很好。
BERT在学习填空的过程中,学到了什么?"它在这个过程中何时学会填动词?什么时候学会填名词? 什么时候学会填代词? 没有人研究过这个问题。
所以我们自己训练BERT后,可以观察到BERT什么时候学会填什么词汇,它是如何提高填空能力的? 好了,细节不是这门课的重点,所以我不在这里讲了。我把论文的链接https://arxiv.org/abs/2010.02480放在这里,供大家参考。不过可以提前爆冷一下就是:事实和你直观想象的不一样。
Pre-training a seq2seq model
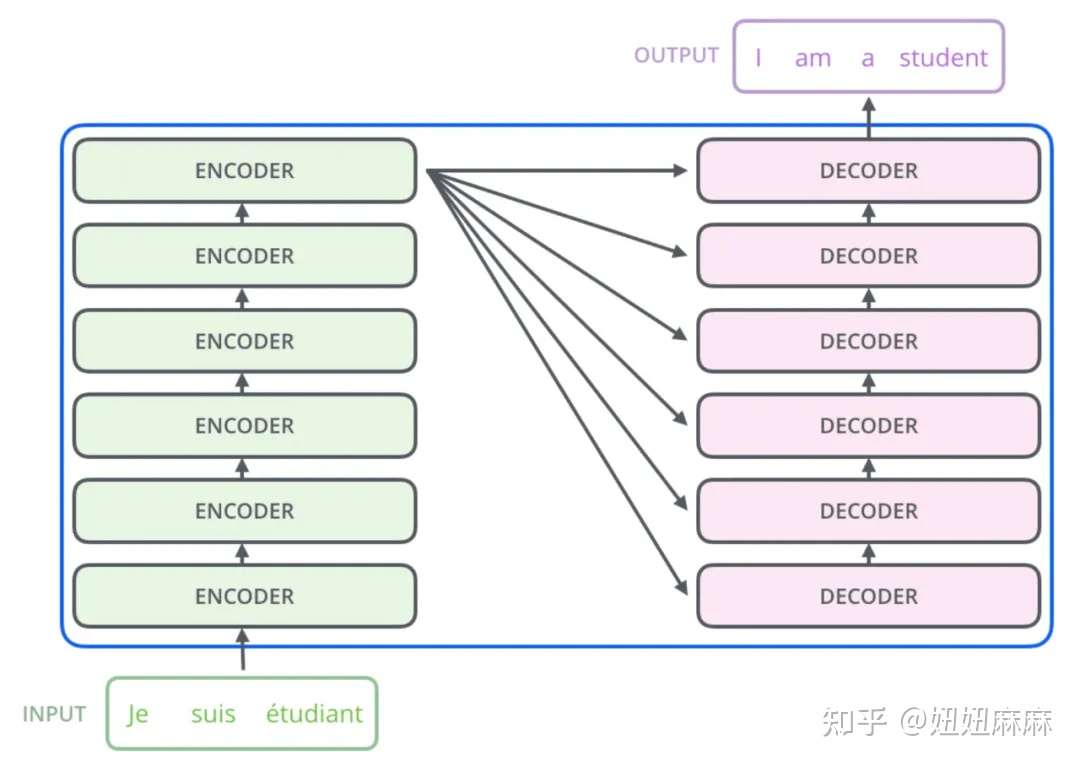
我们补充一点,上述的任务都不包括,Seq2Seq模型,如果我们要解决,Seq2Seq模型呢?BERT只是一个预训练Encoder,有没有办法预训练Seq2Seq模型的Decoder?

有,你就说我有一个Seq2Seq模型,有一个transformer,还有一个Encoder和Decoder。输入是一串句子,输出是一串句子,中间用Cross Attention连接起来,然后你故意在Encoder的输入上做一些干扰来破坏它,我以后会具体告诉你我说的 "破坏 "是什么意思
Encoder看到的是被破坏的结果,那么Decoder应该输出句子被破坏前的结果,训练这个模型实际上是预训练一个Seq2Seq模型。
有一篇论文叫MASS:

在MASS中,它说破坏的方法是,就像BERT做的那样,只要遮住一些地方就可以了,然后有各种方法来破坏它,比如,删除一些词,打乱词的顺序,旋转词的顺序。或者插入一个MASK,再去掉一些词。总之,有各种方法。在破坏了输入的句子之后,它可以通过Seq2Seq模型来恢复它。
你可能会问,有那么多的mask方法,哪种方法更好呢?也许你想自己做一些实验来试试,让我告诉你,你不需要做,谷歌为你做的,有一篇论文叫T5。

T5的全称是Transfer Text-To-Text Transformer,有五个T,所以叫T5。在这个T5里面,它只是做了各种尝试,它做了你能想象的所有组合。这篇论文有67页,你可以回去读一下,看看结论。
T5是在一个语料库上训练的,叫 "Colossal Clean Crawled Corpus",对于这个数据集,Colossal就是巨无霸,就是非常巨大的意思,它叫C4,你用C4来训练T5,大家都是命名高手。这个命名非常强大,这个C4有多大?
C4是一个公共数据集,你可以下载它,它是公共的,但是它的原始文件大小是7TB,你可以下载它,但是你不知道把它保存在哪里,加载之后,你可以通过脚本做预处理,由谷歌提供。这个脚本有一个文件,我看到它在网站上发布了,语料库网站上的文件说,用一个GPU做预处理需要355天,你可以下载它,但你在预处理时有问题。所以,你可以发现,在深度学习中,数据量和模型都很惊人。